贝贝60秒:果然一图胜千言
曲政 / 2019-09-05
今天是贝贝报告给你的第 189 天
2019-09-05 星期四
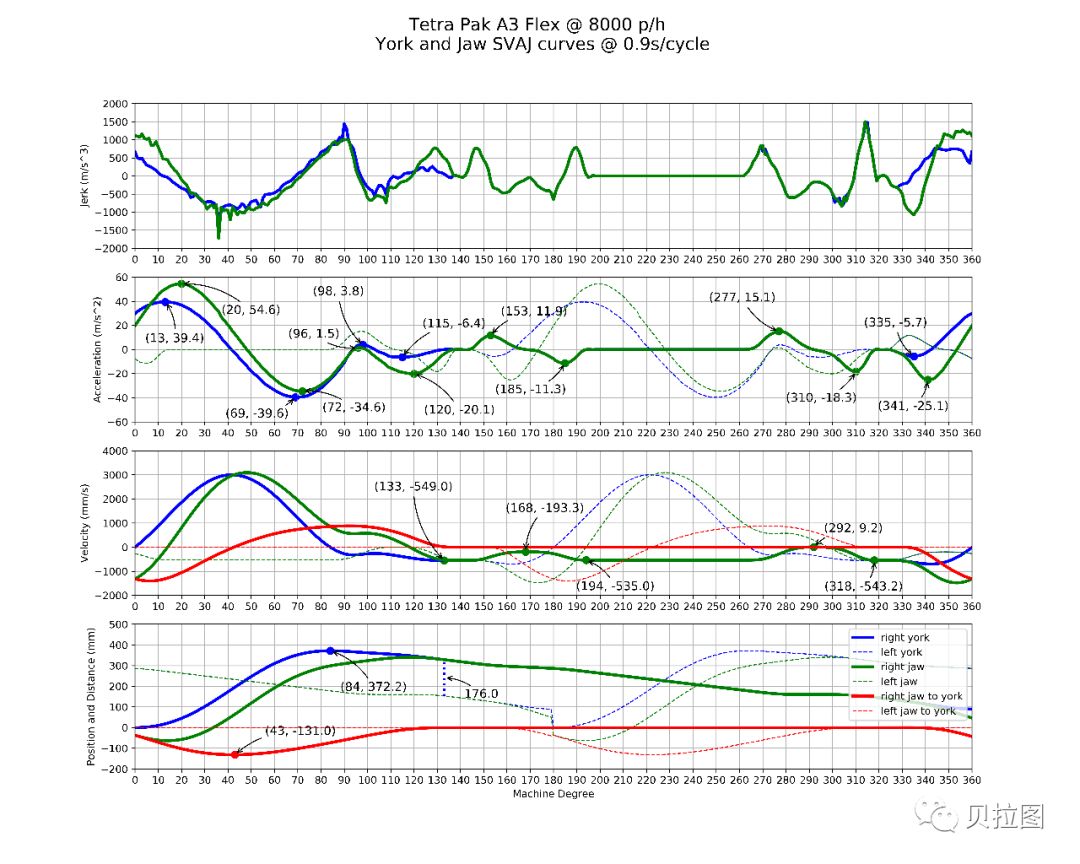
今天重新生成了一张图,读出了更多信息。我明白了计算机工程师为什么喜欢讲:“Talk is cheap, show me the code.”
我们机械工程师喜欢看图,也许可以说:“拿开这些数据,给我看图。”
我今天也不多讲了,就呈现那张图,还有生成图的命令,以及读取的原始数据。
import csv
from collections import namedtuple
import numpy as np
from scipy.integrate import cumtrapz
def get_csv_data():
"""
Get 360 degree york and jaw acceleration data from csv file.
:return: lists of float of data
"""
with open('../data/RawData_360.csv') as f:
f_csv = csv.reader(f)
headings = next(f_csv)
Row = namedtuple('Row', headings)
degree, york_acc, jaw_acc = [], [], []
for r in f_csv:
row = Row(*r)
degree.append(int(row.Degree))
york_acc.append(float(row.York_acc))
jaw_acc.append(float(row.Jaw_acc))
return np.array(degree), np.array(york_acc), np.array(jaw_acc)
def meet_jork_jaw_there(york_acc, jaw_acc):
for i in range(130, 340):
if abs(york_acc[i] - jaw_acc[i]) < 0.3:
york_acc[i] = jaw_acc[i] = (york_acc[i] + jaw_acc[i])/2
return york_acc, jaw_acc
def zerolyse_part_of_acc(york_acc, jaw_acc):
"""In the center part, they should be exact zeros.
:param york_acc:
:param jaw_acc:
:return: side effect
"""
for i in range(198, 263):
if abs(york_acc[i]) < 0.3:
york_acc[i] = jaw_acc[i] = 0
return york_acc, jaw_acc
def calculate_avp():
"""Calculate the acceleration, velocity and placement from csv data.
:return """
degree, york_acc, jaw_acc = get_csv_data()
york_acc -= 0.169
jaw_acc -= 0.159
york_acc, jaw_acc = meet_jork_jaw_there(york_acc, jaw_acc)
york_acc, jaw_acc = zerolyse_part_of_acc(york_acc,jaw_acc)
york_velo = cumtrapz(york_acc, degree, initial=0) * (0.9 / 360 * 1000)
jaw_velo = cumtrapz(jaw_acc, degree, initial=0) * (0.9 / 360 * 1000)
jaw_velo = jaw_velo - (jaw_velo[220] - york_velo[220])
york_place = cumtrapz(york_velo, degree, initial=0) * (0.9 / 360)
jaw_place = cumtrapz(jaw_velo, degree, initial=0) * (0.9 / 360)
jaw_place += york_place[230]-jaw_place[230]
return degree, york_acc, jaw_acc, york_velo, jaw_velo, york_place, jaw_place
if __name__ == "__main__":
degree, york_acc, jaw_acc, york_velo, jaw_velo, york_place, jaw_place = calculate_avp()
print('the last three of york_velocity:', york_velo[-3], york_velo[-2], york_velo[-1])
# print('the last two of jaw_velocity:', jaw_velo[-2], jaw_velo[-1])
print('the first three of york_velocity:', york_velo[0], york_velo[1], york_velo[2])
print(york_velo[-3] - york_velo[-2])
print(york_velo[1] - york_velo[2])
print(york_velo[-2] - york_velo[1])
print('the last three of jaw_velocity:', jaw_velo[-3], jaw_velo[-2], jaw_velo[-1])
# print('the last two of jaw_velocity:', jaw_velo[-2], jaw_velo[-1])
print('the first three of jaw_velocity:', jaw_velo[0], jaw_velo[1], jaw_velo[2])
print(jaw_velo[-3] - jaw_velo[-2])
print(jaw_velo[1] - jaw_velo[2])
print(jaw_velo[-2] - jaw_velo[1])
print("-"*10)
print(york_place[133]-york_place[133+180])
# def bisection_search(start ,end):
# TODO: fine tune the adjust value
#
from read_raw_data import calculate_avp
import matplotlib.pyplot as plt
import numpy as np
# Get data from raw csv data as right york and jaw pair.
d, \
right_york_acc, right_jaw_acc, \
right_york_velo, right_jaw_velo, \
right_york_place, right_jaw_place \
= calculate_avp()
right_york_jerk = np.ones(361)
right_york_jerk[:360] = np.diff(right_york_acc)
right_york_jerk[-1] = right_york_jerk[0] # fill the end point as the same of start
right_york_jerk = right_york_jerk / (0.9 / 360)
right_jaw_jerk= np.ones(361)
right_jaw_jerk[:360] = np.diff(right_jaw_acc)
right_jaw_jerk[-1] = right_jaw_jerk[0] # fill end point
right_jaw_jerk = right_jaw_jerk / (0.9 / 360)
# Slicing data for the left york and jaw pair.
left_york_acc = np.hstack((right_york_acc[-181:-1], right_york_acc[:181]))
left_jaw_acc = np.hstack((right_jaw_acc[-181:-1], right_jaw_acc[:181]))
left_york_velo = np.hstack((right_york_velo[-181:-1], right_york_velo[:181]))
left_jaw_velo = np.hstack((right_jaw_velo[-181:-1], right_jaw_velo[:181]))
left_york_place = np.hstack((right_york_place[-181:-1], right_york_place[:181]))
left_jaw_place = np.hstack((right_jaw_place[-181:-1], right_jaw_place[:181]))
# Calculate the relative velocities and placements between york and jaw.
right_jaw_to_york_velo = right_jaw_velo - right_york_velo
right_jaw_to_york_place = right_jaw_place - right_york_place
left_jaw_to_york_velo = left_jaw_velo - left_york_velo
left_jaw_to_york_place = left_jaw_place - left_york_place
def annotate_max_min_part_curve(a, start=0, end=None, col='red', mark_size=50, position=(50, 50), font_size=12):
"""Mark a scatter on the curve of an array at index with position coordinate.
:param a: array-like object
:param start, end: int indicating the place of certain item in the array
:param col: string of scatter color, better being the same with the curve of array
:param mark_size: int (of points?)
:param position: tuple of two ints or floats, relative to the scatter's place
:param font_size: int of the messages' size
:return: None, effecting the plt object
"""
if a[start] <= a[start + 1] and a[end - 1] >= a[end]:
f = np.argmax
elif a[start] >= a[start + 1] and a[end - 1] <= a[end]:
f = np.argmin
else:
raise IndexError
index = f(a[start:end]) + start
plt.scatter([index, ], [a[index], ], mark_size, color=col)
plt.annotate("(" + str(index) + ', '+ str(round(a[index], 1)) + ")",
xy=(index, a[index]), xycoords='data',
xytext=position, textcoords='offset points', fontsize=font_size,
arrowprops=dict(arrowstyle="->", connectionstyle="arc3,rad=.2"))
# Create a figure of size 8x6 inches, 80 dots per inch
fig = plt.figure(figsize=(15, 12), dpi=80)
fig.suptitle('Tetra Pak A3 Flex @ 8000 p/h \n York and Jaw SVAJ curves @ 0.9s/cycle', fontsize='xx-large')
# Jerk
plt.subplot(4, 1, 1)
plt.grid()
plt.ylabel("Jerk (m/s^3)")
plt.plot(d, right_york_jerk, color="blue", linewidth=3.0, linestyle="-", label="right york")
plt.plot(d, right_jaw_jerk, color="green", linewidth=3.0, linestyle="-", label="right jaw")
# plt.legend(loc='upper right')
plt.xlim(0.0, 360.0)
plt.xticks(np.linspace(0, 360, 37, endpoint=True))
plt.ylim(-2000.0, 2000.0)
plt.yticks(np.linspace(-2000, 2000, 9, endpoint=True))
# Acceleration
plt.subplot(4, 1, 2)
plt.grid()
plt.ylabel("Acceleration (m/s^2)")
plt.plot(d, right_york_acc, color="blue", linewidth=3.0, linestyle="-", label="right york")
plt.plot(d, left_york_acc, color="blue", linewidth=1.0, linestyle="--", label="left york")
# Plot jaw acceleration with a green continuous line of width 1 (pixels)
plt.plot(d, right_jaw_acc, color="green", linewidth=3.0, linestyle="-", label="right jaw")
plt.plot(d, left_jaw_acc, color="green", linewidth=1.0, linestyle="--", label="left jaw")
annotate_max_min_part_curve(right_york_acc, 0, 20, col="blue", position=(-20,-40))
annotate_max_min_part_curve(right_jaw_acc, 10, 30, col="green", position=(40,-30))
annotate_max_min_part_curve(right_york_acc, 60, 80, col="blue", position=(-70,-20))
annotate_max_min_part_curve(right_jaw_acc, 60, 80, col="green", position=(20,-20))
annotate_max_min_part_curve(right_york_acc, 90, 100, col="blue", position=(-50,50))
annotate_max_min_part_curve(right_jaw_acc, 90, 100, col="green", position=(-70,10))
annotate_max_min_part_curve(right_york_acc, 110, 130, col="blue", position=(20,30))
annotate_max_min_part_curve(right_jaw_acc, 110, 130, col="green", position=(10,-40))
annotate_max_min_part_curve(right_jaw_acc, 150, 160, col="green", position=(10,20))
annotate_max_min_part_curve(right_jaw_acc, 180, 190, col="green", position=(-70,-30))
annotate_max_min_part_curve(right_jaw_acc, 270, 280, col="green", position=(-70,30))
annotate_max_min_part_curve(right_jaw_acc, 300, 315, col="green", position=(-70,-30))
annotate_max_min_part_curve(right_york_acc, 330, 340, col="blue", position=(-50,30))
annotate_max_min_part_curve(right_jaw_acc, 330, 350, col="green", position=(-50,-30))
# plt.legend(loc='upper right')
plt.xlim(0.0, 360.0)
plt.xticks(np.linspace(0, 360, 37, endpoint=True))
plt.ylim(-60.0, 60.0)
plt.yticks(np.linspace(-60, 60, 7, endpoint=True))
# Velocity
plt.subplot(4, 1, 3)
plt.grid()
plt.ylabel("Velocity (mm/s)")
plt.plot(d, right_york_velo, color="blue", linewidth=3.0, linestyle="-", label="right york")
plt.plot(d, left_york_velo, color="blue", linewidth=1.0, linestyle="--", label="left york")
plt.plot(d, right_jaw_velo, color="green", linewidth=3.0, linestyle="-", label="right jaw")
plt.plot(d, left_jaw_velo, color="green", linewidth=1.0, linestyle="--", label="left jaw")
plt.plot(d, right_jaw_to_york_velo, color="red", linewidth=3.0, linestyle="-", label="right jaw to york")
plt.plot(d, left_jaw_to_york_velo, color="red", linewidth=1.0, linestyle="--", label="left jaw to york")
annotate_max_min_part_curve(right_york_velo, 130, 150, col="green", position=(-70,70))
annotate_max_min_part_curve(right_york_velo, 160, 180, col="green", position=(-20,40))
annotate_max_min_part_curve(right_york_velo, 180, 280, col="green", position=(-10,-30))
annotate_max_min_part_curve(right_york_velo, 280, 310, col="green", position=(10,15))
annotate_max_min_part_curve(right_york_velo, 310, 320, col="green", position=(-50,-30))
# plt.legend(loc='upper right')
plt.xlim(0.0, 360.0)
plt.xticks(np.linspace(0, 360, 37, endpoint=True))
plt.ylim(-2000, 4000)
plt.yticks(np.linspace(-2000, 4000, 7, endpoint=True))
plt.subplot(4, 1, 4)
plt.grid()
plt.xlabel("Machine Degree")
plt.ylabel("Position and Distance (mm)")
plt.plot(d, right_york_place, color="blue", linewidth=3.0, linestyle="-", label="right york")
plt.plot(d, left_york_place, color="blue", linewidth=1.0, linestyle="--", label="left york")
plt.plot(d, right_jaw_place, color="green", linewidth=3.0, linestyle="-", label="right jaw")
plt.plot(d, left_jaw_place, color="green", linewidth=1.0, linestyle="--", label="left jaw")
plt.plot(d, right_jaw_to_york_place, color="red", linewidth=3.0, linestyle="-", label="right jaw to york")
plt.plot(d, left_jaw_to_york_place, color="red", linewidth=1.0, linestyle="--", label="left jaw to york")
index_min_diff_right_york_place_right_jaw_place = np.argmin(right_jaw_to_york_place)
index_max_right_york_place = np.argmax(right_york_place)
annotate_max_min_part_curve(right_jaw_to_york_place, 20, 80, col="red", position=(30,20))
annotate_max_min_part_curve(right_york_place, 40, 100, col="blue", position=(10,-40))
plt.plot([133, 133], [left_york_place[133], right_york_place[133]], color='blue', linewidth=2, linestyle=":")
plt.annotate(str(round(right_york_place[133] - left_york_place[133])),
xy=(133, (right_york_place[133] + left_york_place[133])/2), xycoords='data',
xytext=(20, -20), textcoords='offset points', fontsize=12,
arrowprops=dict(arrowstyle="->", connectionstyle="arc3,rad=.2"))
plt.legend(loc='upper right')
plt.xlim(0.0, 360.0)
plt.xticks(np.linspace(0, 360, 37, endpoint=True))
plt.ylim(-200, 500)
plt.yticks(np.linspace(-200, 500, 8, endpoint=True))
# Save figure using 720 dots per inch
plt.savefig("Tetra Pak A3 flex Curves.png", dpi=720)
# Show result on screen
# plt.show()